

Système de gestion de batterie 2 : Méthode du circuit équivalent
 |
Description
Introduction au livre
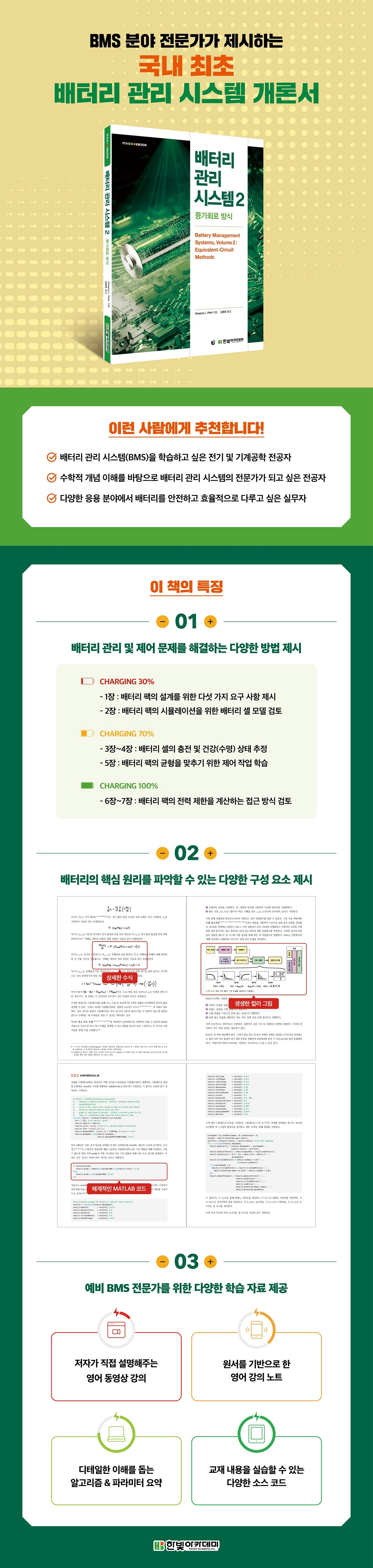
Présenté par des experts du domaine des systèmes de gestion de bâtiments
Introduction du premier système de gestion de batterie en Corée
Ce livre est destiné aux étudiants en génie électrique et mécanique qui souhaitent devenir des experts en systèmes de gestion de batteries (BMS), ainsi qu'aux professionnels de l'industrie des batteries.
Gregory L. Platt, une autorité mondiale en matière de batteries,
Ce livre est une traduction de l'ouvrage du professeur Plett adaptée au contexte national, complétée par l'apport des connaissances et de l'expérience professionnelles du professeur Kim Jong-hoon, premier titulaire d'un doctorat en sciences biomédicales en Corée.
Le volume 2 explique comment résoudre les problèmes de gestion et de contrôle des batteries en se basant sur les équations et les modèles mathématiques dérivés du volume 1.
Nous avons introduit le concept de contrôle optimal de la batterie basé sur la physique, utilisé le modèle de circuit équivalent le plus récent et fourni une compréhension approfondie du BMS grâce à des illustrations intuitives et au développement systématique de formules.
Introduction du premier système de gestion de batterie en Corée
Ce livre est destiné aux étudiants en génie électrique et mécanique qui souhaitent devenir des experts en systèmes de gestion de batteries (BMS), ainsi qu'aux professionnels de l'industrie des batteries.
Gregory L. Platt, une autorité mondiale en matière de batteries,
Ce livre est une traduction de l'ouvrage du professeur Plett adaptée au contexte national, complétée par l'apport des connaissances et de l'expérience professionnelles du professeur Kim Jong-hoon, premier titulaire d'un doctorat en sciences biomédicales en Corée.
Le volume 2 explique comment résoudre les problèmes de gestion et de contrôle des batteries en se basant sur les équations et les modèles mathématiques dérivés du volume 1.
Nous avons introduit le concept de contrôle optimal de la batterie basé sur la physique, utilisé le modèle de circuit équivalent le plus récent et fourni une compréhension approfondie du BMS grâce à des illustrations intuitives et au développement systématique de formules.
- Vous pouvez consulter un aperçu du contenu du livre.
Aperçu
indice
CHAPITRE 01 Exigences du système de gestion technique du bâtiment (GTB)
1.1 Topologie du bloc-batterie
1.2 Exigences relatives à la conception du système de gestion technique du bâtiment (GTB)
1.3 Exigence 1a : Détection de tension
1.4 Exigence 1b : Détection de température
1.5 Exigence 1c : Détection de courant
1.6 Exigence 1d : Commande de contacteur haute tension
1.7 Exigence 1e : Détection isolée
1.8 Exigence 1f : Contrôle thermique
1.9 Exigence 2 : Protection
1.10 Exigence 3a : Commande du chargeur
1.11 Exigence 3b : Communication via bus CAN
1.12 Exigence 3c : Fonctionnalités du journal de bord
1.13 Exigence 4a : Estimation de l'état de la charge
1.14 Exigence 4b : Estimation énergétique
1.15 Exigence 4c : Estimation de la puissance
1.16 Exigence 5 : Diagnostics
1.17 Conclusion et perspectives d'avenir
CHAPITRE 02 Simulation de la batterie
2.1 Modélisation des cellules de batterie
2.2 Approche de modélisation empirique
2.3 Approche de modélisation basée sur la physique
2.4 Simulation de véhicule électrique
2.5 Équations de la dynamique des véhicules
2.6 Code de simulation de véhicule électrique
2.7 Résultats de simulation de véhicules électriques
2.8 Simulation à puissance constante et à tension constante
2.9 Simulation de la batterie
2.10 Code de simulation PCM
2.11 Exemple de résultats PCM
2.12 Code de simulation SCM
2.13 Exemple de résultats SCM
2.14 Conclusion et perspectives d'avenir
CHAPITRE 03 Estimation de l'état de la batterie
3.1 Estimation de l'état de charge (SOC)
3.2 Définition précise de l'état de charge
3.3 Quelques approches d'estimation du SOC
3.4 Examen aléatoire du processus
3.5 Inférence probabiliste séquentielle
3.6 Filtre de Kalman linéaire
3.7 Filtre de Kalman étendu
3.8 Implémentation de l'EKF à l'aide d'un modèle de cellule ESC
3.9 Problèmes liés à l'EKF améliorés par la méthode du point sigma
Filtre de Kalman à point sigma 3.10
3.11 Implémentation de SPKF à l'aide du modèle de cellule ESC
3.12 Problèmes pratiques liés aux capteurs et à l'initialisation
3.13 Bar - Réduction de la complexité de calcul grâce au filtrage delta
3.14 Conclusion et perspectives d'avenir
3.15 Algorithme d'estimation d'état
3.16 Valeur critique de χ^2_υ(α, df)
CHAPITRE 04 Estimation de l'état de la batterie
4.1 Nécessité d'estimer l'état de santé des batteries
4.2 Vieillissement de la cathode
4.3 Vieillissement bipolaire
4.4 Sensibilité à la tension pour R0
4.5 Code pour estimer R0
4.6 Sensibilité de la tension à la capacité totale Q
4.7 Estimation des paramètres à l'aide du filtre de Kalman
4.8 Estimation des paramètres EKF
4.9 Estimation des paramètres SPKF
4.10 Estimation conjointe et estimation duale
4.11 Robustesse et vitesse
4.12 Estimations non biaisées de la capacité totale par régression linéaire
4.13 Méthode des moindres carrés ordinaires pondérés
4.14 Méthode des moindres carrés pondérés totaux
4.15 Excellent ajustement du modèle
4.16 Intervalles de confiance
4.17 Moindres carrés totaux simplifiés
4.18 Solution complète approximative
4.19 Code de simulation par méthode
4.20 Exemple de simulation d'un véhicule hybride électrique
4.21 Exemple de simulation de véhicule électrique
4.22 Discussion de la simulation
4.23 Conclusion et perspectives d'avenir
4.24 Algorithme de filtre de Kalman non linéaire
CHAPITRE 05 ÉQUILIBRAGE CELLULAIRE
5.1 Causes du déséquilibre
5.2 Qu'est-ce qui n'est pas la cause du déséquilibre ?
5.3 Considérations relatives à l'équilibrage de la conception
5.4 Circuit d'équilibrage
5.5 À quelle vitesse faut-il atteindre l'équilibre ?
5.6 Résultats de la simulation d'équilibrage
5.7 Conclusion et perspectives d'avenir
CHAPITRE 06 Estimation de la limite de puissance basée sur la tension
6.1 Limitation de puissance basée sur la tension
6.2 Limitation de puissance à l'aide d'un modèle de cellule simple
6.3 Limitation de puissance à l'aide du modèle de cellule entière
6.4 Dichotomie
6.5 Conclusion et perspectives d'avenir
CHAPITRE 07 Contrôle optimal basé sur la physique
7.1 Minimisation de la dégradation des performances
7.2 Formation et croissance de l'interface électrolyte solide (SEI)
Résultats ROM 7.3 SEI
7.4 Dépôt de lithium lors d'une surcharge
Résultats de la culture ROM 7.5
7.6 Optimisation de la limite de puissance
7.7 Charge par prise
7.8 Exemple de charge rapide
7.9 Calcul de la puissance dynamique
7.10 Conclusion et perspectives d'avenir
7.11 Paramètres utilisés dans la simulation
Recherche
1.1 Topologie du bloc-batterie
1.2 Exigences relatives à la conception du système de gestion technique du bâtiment (GTB)
1.3 Exigence 1a : Détection de tension
1.4 Exigence 1b : Détection de température
1.5 Exigence 1c : Détection de courant
1.6 Exigence 1d : Commande de contacteur haute tension
1.7 Exigence 1e : Détection isolée
1.8 Exigence 1f : Contrôle thermique
1.9 Exigence 2 : Protection
1.10 Exigence 3a : Commande du chargeur
1.11 Exigence 3b : Communication via bus CAN
1.12 Exigence 3c : Fonctionnalités du journal de bord
1.13 Exigence 4a : Estimation de l'état de la charge
1.14 Exigence 4b : Estimation énergétique
1.15 Exigence 4c : Estimation de la puissance
1.16 Exigence 5 : Diagnostics
1.17 Conclusion et perspectives d'avenir
CHAPITRE 02 Simulation de la batterie
2.1 Modélisation des cellules de batterie
2.2 Approche de modélisation empirique
2.3 Approche de modélisation basée sur la physique
2.4 Simulation de véhicule électrique
2.5 Équations de la dynamique des véhicules
2.6 Code de simulation de véhicule électrique
2.7 Résultats de simulation de véhicules électriques
2.8 Simulation à puissance constante et à tension constante
2.9 Simulation de la batterie
2.10 Code de simulation PCM
2.11 Exemple de résultats PCM
2.12 Code de simulation SCM
2.13 Exemple de résultats SCM
2.14 Conclusion et perspectives d'avenir
CHAPITRE 03 Estimation de l'état de la batterie
3.1 Estimation de l'état de charge (SOC)
3.2 Définition précise de l'état de charge
3.3 Quelques approches d'estimation du SOC
3.4 Examen aléatoire du processus
3.5 Inférence probabiliste séquentielle
3.6 Filtre de Kalman linéaire
3.7 Filtre de Kalman étendu
3.8 Implémentation de l'EKF à l'aide d'un modèle de cellule ESC
3.9 Problèmes liés à l'EKF améliorés par la méthode du point sigma
Filtre de Kalman à point sigma 3.10
3.11 Implémentation de SPKF à l'aide du modèle de cellule ESC
3.12 Problèmes pratiques liés aux capteurs et à l'initialisation
3.13 Bar - Réduction de la complexité de calcul grâce au filtrage delta
3.14 Conclusion et perspectives d'avenir
3.15 Algorithme d'estimation d'état
3.16 Valeur critique de χ^2_υ(α, df)
CHAPITRE 04 Estimation de l'état de la batterie
4.1 Nécessité d'estimer l'état de santé des batteries
4.2 Vieillissement de la cathode
4.3 Vieillissement bipolaire
4.4 Sensibilité à la tension pour R0
4.5 Code pour estimer R0
4.6 Sensibilité de la tension à la capacité totale Q
4.7 Estimation des paramètres à l'aide du filtre de Kalman
4.8 Estimation des paramètres EKF
4.9 Estimation des paramètres SPKF
4.10 Estimation conjointe et estimation duale
4.11 Robustesse et vitesse
4.12 Estimations non biaisées de la capacité totale par régression linéaire
4.13 Méthode des moindres carrés ordinaires pondérés
4.14 Méthode des moindres carrés pondérés totaux
4.15 Excellent ajustement du modèle
4.16 Intervalles de confiance
4.17 Moindres carrés totaux simplifiés
4.18 Solution complète approximative
4.19 Code de simulation par méthode
4.20 Exemple de simulation d'un véhicule hybride électrique
4.21 Exemple de simulation de véhicule électrique
4.22 Discussion de la simulation
4.23 Conclusion et perspectives d'avenir
4.24 Algorithme de filtre de Kalman non linéaire
CHAPITRE 05 ÉQUILIBRAGE CELLULAIRE
5.1 Causes du déséquilibre
5.2 Qu'est-ce qui n'est pas la cause du déséquilibre ?
5.3 Considérations relatives à l'équilibrage de la conception
5.4 Circuit d'équilibrage
5.5 À quelle vitesse faut-il atteindre l'équilibre ?
5.6 Résultats de la simulation d'équilibrage
5.7 Conclusion et perspectives d'avenir
CHAPITRE 06 Estimation de la limite de puissance basée sur la tension
6.1 Limitation de puissance basée sur la tension
6.2 Limitation de puissance à l'aide d'un modèle de cellule simple
6.3 Limitation de puissance à l'aide du modèle de cellule entière
6.4 Dichotomie
6.5 Conclusion et perspectives d'avenir
CHAPITRE 07 Contrôle optimal basé sur la physique
7.1 Minimisation de la dégradation des performances
7.2 Formation et croissance de l'interface électrolyte solide (SEI)
Résultats ROM 7.3 SEI
7.4 Dépôt de lithium lors d'une surcharge
Résultats de la culture ROM 7.5
7.6 Optimisation de la limite de puissance
7.7 Charge par prise
7.8 Exemple de charge rapide
7.9 Calcul de la puissance dynamique
7.10 Conclusion et perspectives d'avenir
7.11 Paramètres utilisés dans la simulation
Recherche
Image détaillée
Avis de l'éditeur
Ce livre est le deuxième d'une série de trois volumes décrivant les systèmes de gestion des batteries.
L'objectif de cette série n'est pas simplement d'expliquer les choses de manière encyclopédique, mais de fournir des exemples concrets et les connaissances de base nécessaires pour les comprendre pleinement.
Alors que le volume 1 était consacré à l'élaboration d'équations ou de modèles mathématiques décrivant le fonctionnement interne et externe des batteries, le volume 2 se concentre sur l'application de modèles de circuits équivalents pour résoudre les problèmes de gestion et de contrôle des batteries.
Nous fournissons également divers outils pédagogiques, notamment les cours magistraux et les notes de cours originaux de l'auteur en anglais, ainsi que le code source pour la pratique.
L'objectif de cette série n'est pas simplement d'expliquer les choses de manière encyclopédique, mais de fournir des exemples concrets et les connaissances de base nécessaires pour les comprendre pleinement.
Alors que le volume 1 était consacré à l'élaboration d'équations ou de modèles mathématiques décrivant le fonctionnement interne et externe des batteries, le volume 2 se concentre sur l'application de modèles de circuits équivalents pour résoudre les problèmes de gestion et de contrôle des batteries.
Nous fournissons également divers outils pédagogiques, notamment les cours magistraux et les notes de cours originaux de l'auteur en anglais, ainsi que le code source pour la pratique.
SPÉCIFICATIONS DES PRODUITS
- Date d'émission : 7 juillet 2025
Nombre de pages, poids, dimensions : 360 pages | 729 g | 188 × 257 × 16 mm
- ISBN13 : 9791173400124
Vous aimerez peut-être aussi
카테고리
Langue coréenne


Langue coréenne

![GQ KOREA Mark (Mensuel) : décembre [2025]](http://librairie.coreenne.fr/cdn/shop/files/8ef265dbbfbf186523ed75ba7319009d.jpg?v=1765340328&width=3840)























